Beginn: Ab sofort
Art der Arbeit: Simulativ, Bachelorarbeit, Studienarbeit, Masterarbeit
Ansprechpartner: Yifan Wang
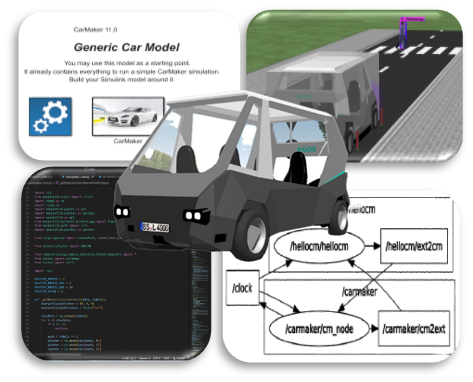
Autonome Fahrsysteme erfordern präzise und effiziente Simulationsmethoden, um komplexe Fahrszenarien in Echtzeit zu testen und zu validieren. ROS2 bietet eine leistungsstarke Plattform für die Entwicklung solcher Systeme. Ziel dieser studentischen Arbeit ist die Entwicklung eines ROS2-basierten Online-Simulationsframeworks, das eine generische Schnittstelle zu CarMaker integriert und Echtzeitanwendungen für das autonome Fahren unterstützt.
Programmiererfahrungen in Python / ROS 1 & 2, MATLAB / Simulink Motivation, Eigeninitiative und strukturiertes Arbeiten
Kenntnisse in CarMaker können von Vorteil sein
Optional: Vorkenntnisse aus den Vorlesungen „Fahrerassistenzsysteme“ und „Automatisiertes Fahren“