Einordnung der Arbeit
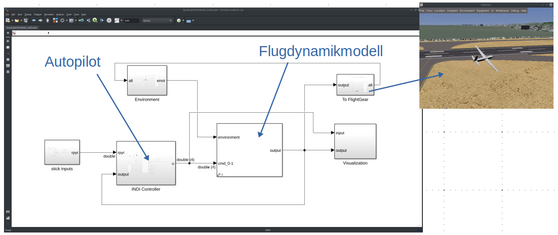
In diesem Projekt soll die quelloffene Autopilotensoftware LindiPlane weiterentwickelt werden, welche in Matlab/Simulink geschrieben ist und sich durch C++ Codegenerierung mit einem Interface in die quelloffene Autopilotensoftware ArduPlane integrieren lässt.
LindiPlane wird aktuell im SE²A Cluster im Projekt EverScale für die Demonstration von Lastabminderungskonzepten verwendet und weiterentwickelt.
Bisher verfügt der Autopilot nur über zwei Flugmodi: einen Lageregler und einen Modus zur automatischen Wegpunktnavigation.
Langfristig sollen weitere Flugmodi und Verbesserungen hinzu kommen. Besonders interessant ist die Weiterentwicklung der Wegpunktnavigation, welche noch nicht alle Eventualitäten berücksichtigt, sowie die Fähigkeit automatisch zu starten und landen.
Mögliche Aufgaben
- Implementierung neuer Flugmodi wie Loiter, Takeoff, Land, Return to Launch,
- Implementierung von Ablaufsteuerungen für verschiedene Flugmodi,
- Weiterentwicklung des Test-Frameworks.
Anforderungen
- Gute Programmierkenntnisse in mind. einer Sprache,
- Sorgfältige Arbeitsweise,
- Erfahrung mit Git von Vorteil,
- Gute Kenntnisse in Matlab/Simulink von Vorteil,
- Gute Kenntnisse in C++ von Vorteil,
- Grundkenntnisse in Regelungstechnik/Flugdynamik/Flugregelung von Vorteil,
- Erfahrung mit Autopilotensoftware, z.B. ArduPilot, von Vorteil.
Kontakt
Yannic Beyer
E-Mail: y.beyer@tu-bs.de
Telefon: 015906187707
Für Fragen stehe ich jederzeit zur Verfügung (E-Mail, Telefon).
Bei Interesse bitte ich um eine E-Mail mit relevanten Unterlagen.